- از ما سوالی دارید؟
- 051-91012054
- پشتیبانی
- info@metsofts.ir
کنترل ابعادی
چکیده
کنترل ابعادی به عنوان یکی از پارامترهای مهم در کنترل کیفیت ، نیازمند وسایلی است که بتواند با سرعت و دقت لازم اندازه ها ی مورد نیاز را استخراج نماید.
کنترل ابعادی اشکال پیچیده چیزی نیست که بتوان با روش های قدیمی مانند گیج گذاری یا حتی استفاده از سنسور های الکترونیکی به سادگی و سرعت با امکان پذیر گردد. تکنیک های ماشین بینایی و پردازش تصویر علم جدیدی است که کنترل کیفی خصوصیات ظاهری جسم مانند اندازه ، رنگ ، شکل و … را با دقت و سرعت بالا مهیا می نماید. در این مقاله پس از بررسی مختصر تجهیزات مورد نیاز برای پیاده سازی یک سامانه کنترل کیفیت مبتنی بر بینایی ماشین، به راهکارها و تجهیزات مورد نیاز برای رسیدن به دقت و اعتماد بالا در سامانه پرداخته می شود. این راهکارها و تجهیزات شامل مباحث اپتیکی ، نورپردازی، اخذ تصویر و نیز نر افزاری می گردد.
واژههای کلیدی: ماشین بینایی – پردازش تصویر – کنترل کیفیت – کنترل ابعادی
۱- مقدمه
پیشرفت های اخیر در صنعت و مطرح شدن هر چه گسترده تر مباحث کیفیت و کیفیت گرایی از یک طرف و توسعه روزافزون فناوری های نوین به خصوص در زمینه ی ابزار دقیق از طرف دیگر ، سبب شده است تا تلاش مضاعفی برای بکارگیری روش های مکانیزه برای افزایش کیفیت محصول صورت پذیرد.
در ساخت و تولید مدرن تجهیزات بازرسی و آزمایش غالباً در ارتباط مستقیم با فرآیند تولید قرار می گیرند و بدین ترتیب مستقیم و یا غیرمستقیم بر کیفیت محصول تولیدی اثر می گذارند.
تکنیک های ماشین بینایی و پردازش تصویر این امکان را مهیا کرده اند تا بتوان ویژگی های مختلف ظاهری مانند رنگ ، اندازه ، شکل و الگو را به صورت خودکار و بدون درنگ ، با دقت با تشخیص داد. این تکنیک ها توانایی بالایی را برای کاربردهای کنترل ابعادی ، به عنوان یکی مهم ترین پارامترهای تضمین کیفیت محصو ت تولیدی ، دارا می باشد.
در این مقاله تلاش شده با معرفی و ارائه راهکارهای مناسب ، مشکلات و راه حل های موجود در زمینه کنترل کیفیت ابعادی، بررسی گردد. با پیشرفت های اخیر در زمینه بینایی ماشین، قابلیت اعتماد و
تکرارپذیری این سیستم ها به حدی رسیده است که می توان بر توانمندی ها و قابلیت های این سیستم ها تکیه کرد و این سیستم ها میتواند جایگزین روش های قدیمی کنترل کیفیت ابعادی مانند گیج ها ،
شابلون ها و نیز پروفایل پروژکتورهایی شود که نیروی انسانی وظیفه خواندن اطلاعات و تصمیم گیری بر روی آن ها را بر عهده داشتند.
۲- شرح علمی و عملی سیستم
-۱-۲ الزامات اپتیکی
موفقیت سیستم های بینایی ماشین در اندازه گیری ابعادی هنگامی به صورت خاص آشکار می شود که با سیستم های باکیفیت اپتیکی یکپارچه گردد.
طراحان سیستم های بینایی ماشین در هنگام استفاده از سیستم های اپتیکی معمولی با مشکلاتی روبرو بودند که دقت اندازه گیری و تکرارپذیری آن را تحت تأثیر قرار می داد. مهم ترین این عوامل عبارت اند از:
۱- بزرگ نمایی غیرثابت با توجه به فاصله جسم از لنز
۲- انحرافات تصویری (image distortion)
۳- ایراد ناشی از پرسپکتیو
۴- عدم کنتراست مناسب برای تشخیص مطمئن لبه ها.
نرم افزارهای پردازش تصویر برای آنکه بتواند به دقت های ابعادی با لاتری دست یابند نیازمند تصاویری با کنتراست بالا و نیز حداقل انحراف و از ریخت افتادگی(distortion) در ساختار تصویر اخذ شده می باشند.
همچنین تأثیرات پرسپکتیو باعث تغییر در بزرگ نمایی در قسمت هایی از جسم می شود که دارای فاصله مختلفی نسبت به لنز قرار دارند.
تأثیر پرسپکتیو در اندازه گیری ابعادی اجزائی که به طور دقیق در جلوی دوربین قرار نگرفته اند و نیز اجسامی که پیچیدگی های سه بعدی در شکل آن ها وجود دارد می تواند دقت اندازه گیری را تحت تأثیر قرار دهد.
در این میان لنزهای Telecentric یک گزینه بسیار مفید برای اندازه گیری ابعادی مبتنی بر پردازش تصویر می باشد. لنزهای Telecentric با کاهش و یا حذف این مشکلات توانسته است به عنوان یک مهره کلیدی برای پیاده سازی و توسعه سیستم های اندازه گیری با دقت با تبدیل گردد.
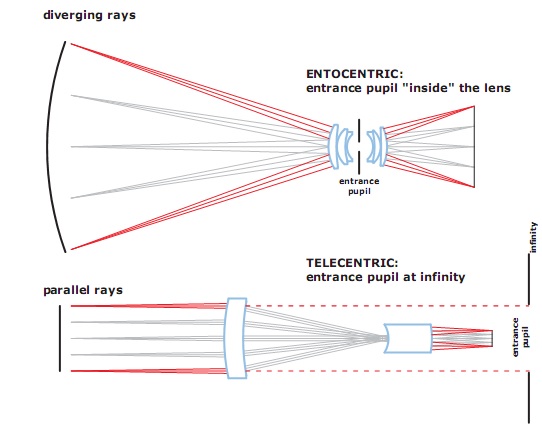
شکل ۱ : اصول کار دو نوع لنز معمولی و تله سنتریک
در زیر به توضیح آنکه چگونه لنزهای Telecentric باعث کاهش یا حذف این ایرادات می شود، پرداخته خواهد شد:
۱- ثبات در بزرگنمایی
در بسیاری از کاربردهای اندازه گیری یک نمای عمود از جسم مورد نیاز است تا یک اندازه گیری خطی صحیح صورت گیرد. در بسیاری از موارد قطعات مکانیکی نمی تواند در جای صحیح خود در جلوی دوربین قرار گیرد( برای مثال به دلیل ارتعاشات) یا شکل قطعه به گونه ای است که اندازه گیری باید در عمق های مختلفی صورت گیرد و یا این که ضخامت جسم(و در نتیجه سطح مورد بررسی) متغیر خواهد بود. در نتیجه یک
سیستم پردازش تصویر نیازمند رسیدن به ارتباط دقیق و قاطع ما بین ابعاد در تصویر اخذشده و ابعاد واقعی جسم می باشد.
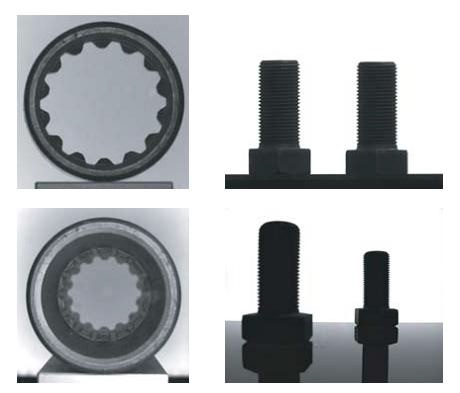
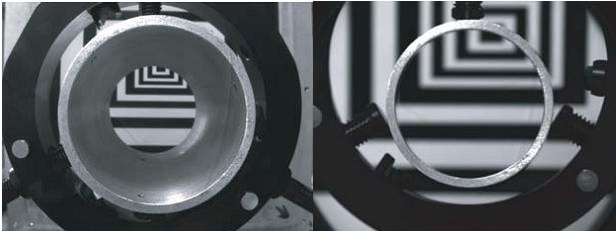
شکل ۲ : در شکل های سمت چپ ،تصویر بدست آمده دیواره داخلی یک جسم سیلندری شکل ، توسط یک لنز Telecentric با و یک لنز معمولی (پایین) به نمایش در آمده است. در شکل های سمت راست، تصویر بدست آمده از یک پیچ ۱۱۱ میلیمتری و وضوح و دقت اندازه گیری توسط یک لنز Telecentric (بالا) و یک لنز معمولی (پایین) به نمایش در آمده است.
لنزهای معمولی بزرگنمایی متغیری را در شرایط مختلف ارائه می کنند به عنوان مثال هنگامی که جسم جابجا می شود ، اندازه تصویر بدست آمده از جسم بر اساس فاصله جسم تا لنز تغییر می کند، به گونه ای
که اشیاء دورتر، کوچک تر و اشیاء نزدیک تر، بزرگ تر به نظر می آیند.
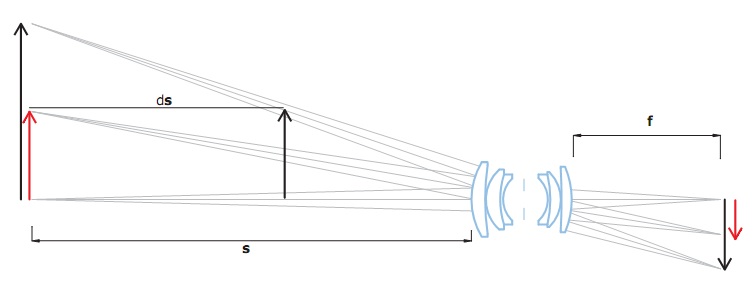
شکل ۳ : نمایش تأثیر فاصله جسم بر ابعاد جسم در لنزهای معمولی
مزیت لنزهای Telecentric این است که اندازه تصویر با جابجایی جسم بدون تغییر باقی می ماند. البته این خاصیت در محدوده خاص از فاصله جسم تا لنز وجود خواهد داشت که آن را عمق دید ( Depth of Field ) یا Telecentric range می گویند.
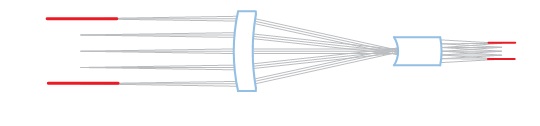
این خاصیت به واسطه مسیر خاص شعاع های نوری در سیستم نوری روی می دهد. به این صورت تنها شعاع های نوری از جسم، اخذ می شوند که به صورت موازی با محور اصلی سیستم اپتیکی سیر می کنند. به همین دلیل قطر لنز جلویی حداقل باید برابر یا بزرگ تر از قطر ناحیه مورد نظر باشد.
این اثر اپتیکی از قرارگیری روزنه دریافت نوری، دقیقا در نقطه کانونی لنز جلویی سیستم اپتیکی حاصل می شود، به گونه ای که نوری که از روزنه دیافراگم دریافت می شود همانند تصویر مجازی اشیایی است که در بینهایت قرار دارند .
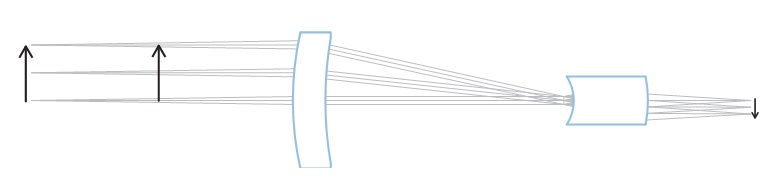
شکل ۴ : در یک لنز Telecentric اکثر شعاع های نوری به صورت موازی سیر می کنند
مفهوم Telecentric Depth یا Range Telecentric عموماً به عمقی از فاصله اطلاق می شود که وضوح و بزرگنمایی در آن عمق ثابت ماند.
با توجه به اینکه قطر لنز جلویی بنزهای Telecentric حداقل باید برابر یا بزرگ تر از قطر ناحیه مورد نظر برای اندازه گیری باشد این لنزها اصولا بزرگ تر، سنگین تر و همچنین گران قیمت تر از لنزهای عمومی هست.
۲- از فرم افتادگی کم ( Distorsion )
از فرم افتادگی تصویر یکی از مشکلاتی است که می تواند باعث خدشه دار کردن دقت اندازه گیری شود. حتی در بهترین سیستم های اپتیکی اجراشده نیز امکان وجود اما ریخت افتادگی های تصویری وجود
دارد، وقتیکه حتی یک پیکسل تفاوت ما بین تصویر درست و تصویر مورد نیاز وجود داشته باشد.
از ریخت افتادگی(Distortion ) به صورت درصد تفاوت مابین فاصله بین یک نقطه از تصویر تا مرکز آن تصویر، در یک تصویر دارای انحرافات از ریخت افتادگی و فاصله همان دو نقطه در یک تصویر بدون انحراف تعریف می شود.
از ریخت افتادگی دایره ای مثبت را، از ریخت افتادگی بالشتکی (pincushion) و منفی آن را ،از ریخت افتادگی بشکه ای (barrel) نیز می گویند. دو نوع از ریخت افتادگی در شکل ۷ نشان داده شده است.
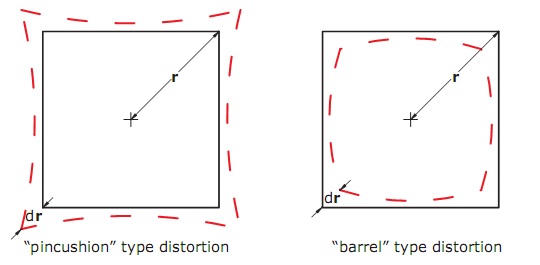
شکل ۷ : انواع از ریخت افتادگی دایره ای
سیستم های اپتیکی عمومی از ریخت افتادگی ای در بازه ی چند درصد تا چند ده درصد را نشان می دهند که این کار اندازه گیری را به طور قابل توجهی دشوار می نماید. این حد انحراف شاید در مصارفی مانند
سیستم ها امنیتی با مصارف عمومی بینایی ماشین مشکلی ایجاد نکند ، ولی در کاربرهای اندازه گیری ابعادی قابل پذیرش نیست. چشم انسان قادر به حذف انحرافاتی بین ۱ تا ۲ درصد باشد. لنزهای Telecentric باکیفیت، اصولا درجه از ریخت افتادگی بسیار کم را در حدود ۰٫۱% را نشان می دهد.
۳- محدودسازی خطای پرسپکتیو:
هنگا استفاده از لنزهای معمولی ، برای تصویربرداری یک جسم سه بعدی(جسمی که کاملاً تحت نباشد) از آنجایی که اشیاء دورتر کوچک تر دیده می شود در نتیجه در اشیائی مانند قسمتداخلی استوانه توخالی، به
دلیل آنکه هر مقطعی از جسم که از لنز دورتر می شود کوچک تر دیده می شود ،در نتیجه دایره ابتدا، بدنه داخلی و دایره انتهای آن استوانه به طور واضحی قابل مشاهده هستند. در مقابل با استفاده از لنزهای
Telecentric ، مرز دایره انتهایی استوانه قابل مشاهده نیست، زیرا که مرزهای دایره های ابتدا و انتها دقیقا بر روی هم قرار گرفته اند.
شکل ۸: محدودسازی خطای پرسپکتیو در لنزهای Telecentric
این اثر به واسطه مسیر شعاع های نوری ناشی می شود؛ در یک لنز معمولی شعاع ای نوری حتی از یک دیواره موازی با محور لنز نیز می تواند از لنز عبور کرد و به گیرنده تصویر برسد. این در حالی است که در یک لنز Telecentric اجزاء و قسمت هایی از جسم که موازی با محور لنز هستند به طور کلی حذف و ناپیدا می شوند.
به طور کلی می توان بیان کرد که لنزهای Telecentric با حذف و عدم نمایش یک بعد، یک تطابق دو بعدی را بین جسم و تصویر ایجاد می کنند که برای اندازه گیری شکل پروفیل جسم بسیار مناسب است.
شکل ۹ : دریافت شعاع های نوری در لنزهای Telecentric و تأثیر آن بر نمایش ساختار سه بعدی جسم
۴- وضوح مناسب تصویر
لنزهای Telecentric از آنجا که ساختار آن نیاز به اجزاء باکیفیت دارد، عموماً هماهنگی لازم با دوربین هایی با رزولوشن با و اندازه پیکسل پایین را دارند، که این موضوع این لنز ها را به عنوان گزینه ی مناسبی برای کاربردهای اندازه گیری ابعادی تبدیل کرده است.
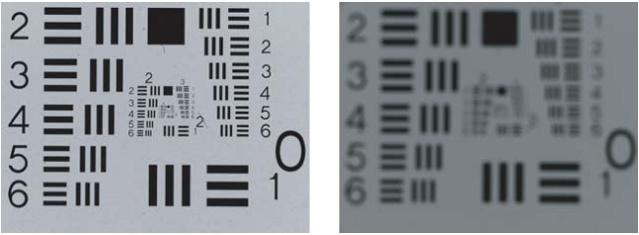
شکل ۱۱ : تفاوت کنتراست تصویر در دو لنز مختلف با استفاده از الگوی تست استاندارد
برای انتخاب لنز و دوربین مناسب لازم است ابتدا به بررسی پارامترهای ورودی به لنز و دوربین بپردازیم. انتخاب لنز Telecentric بر اساس بزرگنمایی آن صورت می گیرد. بزرگ نمایی نسبتی بین ناحیه ی واقعی که در تصویر دیده می شود( Field of view ) و تصویر تشکیل شده بر روی سنسور دوربین است. ناحیه ی واقعی تصویر بستگی به ابعاد مورد نیاز برای بررسی دارد و به گونه ای باید انتخاب شود که بتواند تمامی قطعه را با احتساب جابجایی های احتمالی آن در بر گیرد.
به عنوان مثال برای قطعه ای با قطر ۲۱ میلیمتر است، باید تصویر به گونه ای باشد که تمامی آن در ضلع کمینه ی مستطیل تصویر به راحتی قابل رویت باشد. در نتیجه عرض ناحیه ی دید بسته به ذقت جانمایی قطعه باید مقداری بیشتر از ۲۱ میلیمتر باشد.
پارامتر دیگر در رابطه ی بزرگنمایی، اندازه ی تصویر می باشد. اندازه ی تصویر به اندازه ی سنسور اخذ تصویر درون دوربین وابستگی دارد. سنسورهای اخذ تصویر دارای استاندارهای ابعادی خاص هستند که قطر، ضلع کوچک و بزرگ آن ها مشخص می باشد.
۲-۲- الزامات سامانه اخذ ، انتقال و پردازش تصویر
ابعاد و کیفیت سنسور اخذ تصویر در دوربین های تصویربرداری یکی از پارامترهای مهم در دزت اندازه گیری یک سامانه بینایی ماشین است.
عمومی ترین ابعاد سنسور تصویر که در مصارف ماشین بینایی کاربرد دارد، ۶۴۰*۴۸۰ پیکسل (.۰۳ مگابایت) می باشد. این ابعاد تصویر برای اکثر ابعاد سیستم های بینایی ماشین کفایت می نماید. ولی با توجه به نیازها و انتظارات جدیدی که از یک سیستم بینایی می رود، بخصوص در مواردی که تلورانس اندازه گیری کمتری مورد انتظار است یا نیاز است سطح بیشتری با همان دقت قبلی تصویربرداری شود باید از رزولوشن های بالاتری استفاده نمود. در سال های اخیر دوربین های مخصوص پردازش تصویر با رزولوشن ۳،۲،۱ و ۵ مگاپیکسل به صورت گسترده ای به بازار عرضه شده است. دوربین هایی با رزولوشن های بالاتر نیز به صورت خاص وجود دارد.
یکی از پارامترهایی که در یک دوربین مهم است اندازه ی فیزیکی یک پیکسل بر روی تراشه ی سنسور اخذ تصویر است. اندازه ی هر پیکسل در یک دوربین از حدود ۱۰*۱۰ میکرون شروع شده و با افزایش رزولوشن آن این اندازه کاهش می یابد. به عنوان مثال در یک دوربین ۵ مگاپیکسل در حدود ۲/۲ میکرون می باشد.
یکی از مهم ترین نتایجی که می توان از دو پارامتر اندازه ی پیکسل در یک دوربین و بزرگنمایی یک لنز استفاده شده، به آن رسید، مقدار سطحی از محیط واقعی است که توسط یک پیکسل دریافت می شود. به عبارت دیگر می توان به این نتیجه رسید که یک پیکسل متناظر با چه ابعادی در جهان واقعیت می باشد. از آنجا که یک پیکسل کوچک ترین جزء یک تصویر است، می توان دقت اندازه گیری را از آن بدست آورد. از این رو داریم:
بزرگنمایی/اندازه یک پیکسل= اندازه متناظر یک پیکسل در جهان
به عنوان مثال برای یک دوربین ۵ مگاپیکسل با اندازه ی پیکسل ۴*۴ میکرون داریم و با توجه به لنز انتخاب کرده با بزرگنمایی m=0.18 داریم : ۴٫۴/۰٫۱۸=۴٫۲۴ میکرون
عدد محاسبه شده ،دزت اندازه گیری ( Resolution ) در هنگام استفاده از این لنز و دوربین خواهد بود. البته در بخش های نرم افزاری، همانگونه که در قسمتبعدی گفته خواهد شد با استفاده از تکنیک های subpixel می توان لبه ها را با دقتی ۵ تا ۱۱ برابر دقیقتر از این مقدار بدست آورد. البته باید در نظر داشت که شرایط قطعه و نورپردازی می تواند نقش بسیار مهمی در رسیدن به این دقت داشته باشد.
۲-۳- الزامات نرم افزاری
۲-۳-۱ کالیبره نرم افزاری
علاوه بر آن که با بهبود تجهیزات اپتیکی می توان از ریخت افتادگی تصویر را بهبود بخشید، توسط کالیبره نر افزاری نیز می توان این انحرافات را تا حد قابل قبولیکاهش داد. نحوه کار به این صورت است که یک الگوی دقیق را)دقت آن باید حداقل ده درصد اندازه گیری باشد ( در جلوی دوربین قرار داده می شود. این الگو، با ابعاد و توصیف آن ،در نرم افزار تعریف شده است. نرم افزار با محاسبه تفاوت مابین الگوی پیش فرض و تصویر اخذشده از همان الگو در جهان واقعی ، اقدام به جبران انحرافات و تبدیل به تصاویری خالی از هر گونه تغییر فرم و انحراف می نماید .
۲-۳-۱-۱ کالیبره پارامتر های داخلی دوربین
در هنگام استفاده از هر نوع دوربین و لنزی ، به خاطر ساختمان درونی آن ها، انحرافاتی را در تصویر بدست آمده ناشی می شود که یکی از مهم ترین آن ها انحراف دایره ای تصویر (Radial distortion) می باشد که باعث خمیده شدن خطوط صاف موجود در تصویر می شود. انحراف دیگر که باید کالیبره گردد ، کشیدگی تصویر در قسمت های دور از مرکز تصویر می باشد. این انحرافات بسته به تکنیک مورد استفاده در غالب ۵ تا ۹ پارامتر تعریف می شوند و قابل کالیبره شدن هستند. در شکل ۱۱ ، استفاده از یک الگوی نقطه ای برای کالیبره پارامترهای داخلی نمایش در آمده است.
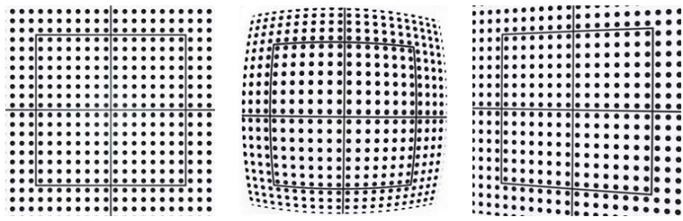
شکل ۱۱ : استفاده از یک الگو نقطه ای برای کالیبره پارامترهای داخلی
۲-۳-۱-۲ کالیبره پارامتر های خارجی دوربین
پارامتر های خارجی دوربین شامل همه ی پارامترهایی است که از موقعیت دوربین نسبت به جسم ناشی می شود. به زبان ساده تر، تبدیل اندازه های بدست آمده از تصویر با واحد پیکسل به واحدهای دنیای واقعی
مانند میلیمتر نیازمند کالیبره پارامتر های خارجی دوربین می باشد.
۲-۳-۲ افزایش دقت با محاسبه جزء پیکسل ها( Sub-pixel )
آشکارسازی لبه ( Edge Detection ) یکی از عملیات های مهم و پر کاربرد در علم پردازش تصویر می باشد و معمولا برای تشخیص لبه های یک شیئ از بین چند شیئ دیگر مورد استفاده زرار می گیرد. تغییرات فیزیکی که در محیط واقعی وجود دارد، در تصویر به صورت تغییر رنگ و تغییر شدت روشنایی ، به صورت لبه، نمایان می شوند.
اهمیت لبه یابی در کاربردهای اندازه گیری مبتنی بر پردازش تصویر از آنجا مشخص می شود که لبه های استخراجی از تصویر متناظر لبه هایی جسم می باشد که آن ها را اندازه گیری می کنیم. هر چه این لبه ها نمایان تر و متمایز تر باشد عملیات لبه برداری را تسهیل و دقت اندازه گیری را بالاتر می برد.
یک پیکسل کوچک ترین واحد فیزیکی در یک تصویر می باشد. در سیستم هایی با دقت اندازه گیری معمولی یک پیکسل به عنوان کوچک ترین واحد اندازه گیری در نظر گرفته می شود که پس از کالیبره می توان آن را به واحدهای متریک تبدیل نمود.
با وجود آنکه یک تصویر از هزاران پیکسل تشکیل شده است، مرزهای یک جسم، هر چقدر هم صاف باشند، به ندرت ممکن است که به طور دقیق در مرز مابین پیکسل های روی سنسور اخذ تصویر فرود آیند.
برای حل این موضوع دانشمندان علم پردازش تصویر بر آن شدند که با استفاده از داده های موجود روشی را برای پیدا کردن دقیق تر لبه ها پیدا کنند.نتیجه ی این تحقیقات استفاده از خصوصیات رنگی پیکسل های مجاور به منظور تبدیل یک پیکسل به پیکسل های کوچک تر است که آن را subpixel می گویند.
در حین عملیات اندازه گیری جزء پیکسل (subpixel) ، نرم افزار سطح رنگ خاکستری در پیکسل های هم جوار نقطه اندازه گیری را بررسی می نماید. نرم افزار این اطلاعات را برای درون یابی و تخمین مکان دقیق مرزها با دقت کسری از یک پیکسل استفاده می کند.
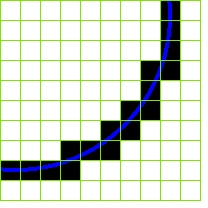
شکل ۱۳ – مرز لبه پیداشده با دقت جزء پیکسل
بهترین برازش لبه ها (Best fitting the edges)
به منظور پیدا کردن مکان دقیق یک لبه در عرض یک پیکسل مقدار رنگ خاکستری هر دو طرف هر پیکسل اندازه گیری می شود. در مثال ساده ای که در زیر به نمایش درآمده است.
همان گونه که مشاهده می شود، مقدار رنگ خاکستری مرز لبه، ترکیبی از مقدار رنگ خاکستری سمت یک سمت لبه و مقدار رنگ خاکستری سمت دیگر لبه هست. با مقایسه این دو رنگ امکان بدست آوردن مکان دقیق مرز با دقت کسری از یک پیکسل امکان پذیر می گردد. این محاسبه یک درون یابی است و به شکل زیر نوشته می شود:
(Subpixel location = (edge grey level-right grey level) / (left grey level – right grey level
در مثال با اگر مقدار رنگ خاکستری مرز لبه ۵۵ ، مقدار سمت چپ لبه ۴۱ و مقدار خاکستری سمت راست لبه ۰۱ باشد، با درون یابی خواهیم داشت:
محل دزیق مرز با دزت = (۵۵-۰۱)/(۴۱-۰۱)=(-۵)(-۲۱)= .۲۵
در نتیجه مکان دزیق مرز در ۲۵ درصدی عرض یک پیکسل ، متمایل به زسمت پر رنگ ، بدست آمد. این درون یابی از آن جهت به این نتیجه رسیده است که ۲۵ درصد روشنایی در یک طرف و ۷۵ درصد دیگر روشنایی در طرف دیگر لبه قرار دارد.

شکل ۱۴ – نحوه پیدا کردن مرز لبه ها با دقت جزء پیکسل
در صورت لبه یابی با دزت جزء پیکسل ، دزت پیدا کردن اشیا و حفره ها (blob ) در تصویر افزایش می یابد و تلورانس ها برای اندازه گیری ها به طور چشم گیری کاهش می یابد. در ادامه به بررسی چند نمونه از تأثیرات این گونه لبه یابی بر روی دزت پیدا کردن مرکز یک حفره در تصویر و نیز بدست آوردن قطر حفره پرداخته خواهد شد.
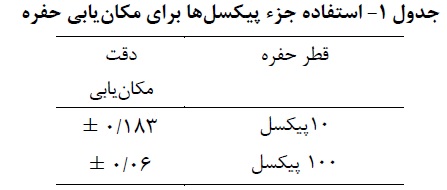
۱- پیدا کردن مرکز یک حفره در تصویر:
مرکز یک حفره برای آدرس دهی دقیق آن در تصویر استفاده می شود. استفاده از دزت جزء پیکسل می تواند دقت آدرس دهی مکانی حفره را تحت تأثیر قرار دهد. برای یک دایره، به طور کلی این دقت در ۰٫۵ معکوس جذر قطر در واحد پیکسل می باشد.
Sub pixel accuracy of centroid of circle blob= 0.5/sqrt(diameter) pixels
هر چه قطر بیشتر باشد دقت پیدا کردن مرکز افزایش می یابد.
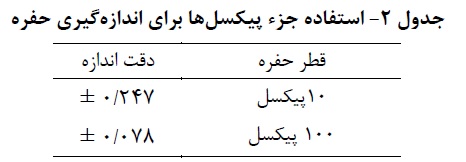
۲- بدست آوردن قطر حفره:
قطر یک حفره برای اندازه گیری دقیق آن حفره در تصویر استفاده می شود. استفاده از دزت subpixel می تواند اندازه گیری اندازه ی حفره را تحت تأثیر قرار دهد. برای یک دایره، به طور کلی این دقتدر حدود ۰٫۷۸
معکوس مجذور قطر می باشد.
Sub pixel accuracy of diameter of circle blob= 0.78/sqrt(diameter) pixels
۲-۴- الزامات نورپردازی
تشخیص ضرورت اینکه کامیابی یک سیستم بینایی ماشین بستگی شدیدی به شرایط و روش های نورپردازی آن دارد، در حال گسترش است. برای تحقق یک سیستم پایدار، اخذ تصاویری با کنتراست مناسب ، ثابت و بدون توجه به تغییرات شرایط نوری اطراف و نیز انعکاس های خود جسم، دارای اهمیت بسیار است. تأثیر نورپردازی بر سایر مراحل پردازش تصویر به حدی است که بعضی بر این باورند که ابتدا باید به شرایط نورپردازی ایده آل رسید و سپس اقدام به برنامه ریزی و برنامه نویسی بر روی تصویر اخذشده نمود. در سال های اخیر با گسترش بکارگیری پردازش تصویر برای کنترل کیفیت قطعات پیچیده تر ، نورپردازی های پیچیده تری نیز به کار گرفته شده است. تولیدکنندگان تجهیزات روشنایی تلاش کرده اند با طراحی ماژو ر تجهیزات نورپردازی، پیاده سازی آن ها را برای سیستم های بینایی ماشین تسهیل نمایند.
از آنجایی که در بسیاری از سیستم های اندازه گیری، هدف، اندازه گیری کانتور دور جسم و یا اندازه گیری حفره های راه بدر است، نور پس زمینه یکی از پرکاربردترین روش های نورپردازی در اندازه گیری ابعادی است.
روش کار بگونه ای است که یک صفحه روشن، با نور غیرمستقیم، از زیر به جسم می تابد و دوربین در با ی جسم لبه های حاشیه ای جسم را می بیند. از آنجایی که سطح روی جسم نوری را دریافت نمی کند ، هیچ لبه مزاحمی برای تشخیص لبه ها وجود ندارد. در شکل ۱۵ یک نمونه نورپردازی پس زمینه به نمایش درامده است.
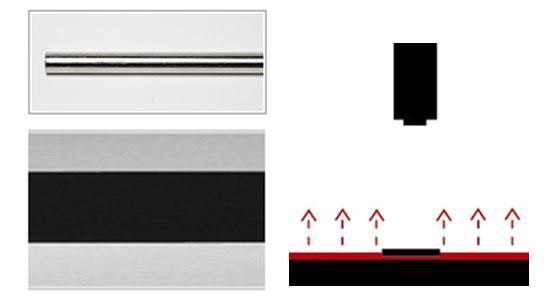
شکل ۱۱ – استفاده از نورپردازی پس زمینه برای افزایش دقت پیدا کردن لبه های یک جسم براق
در هنگا تصویربرداری بسیار دقیق از یک جسم به خصوص وقتی از یک نور پس زمینه برای نورپردازی جسم استفاده شود، عموماً پیدا کردن مرز بسیار دقیق و قاطع جسم کار آسانی نیست. این اتفاق به این دلیل می افتد که پیکسل های روشن که در پس زمینه هستند تمایل به همپوشانی با پیکسل های تاریکی که در لبه های جسم هستند، دارند.
فراتر از این، اگر جسم دارای ساختار سه بعدی باشد، تأثیر دیواره ها می تواند این اندازه گیری را دشوارتر نماید. این اثر به طور قابل توجهی می تواند توسط لنزهای Telecentric کاهش یابد. به این گونه که بدلیل ساختار این لنزها ، تنها شعاع های نوری جذب می شوند که دارای راستایی نزدیک به موازی نسبت به راستای لنز دارند و در نتیجه انعکاس ناشی از دیواره جسم نمی تواند دزت اندازه گیری را تحت تأثیر قرار دهد.
برای خلاص شدن کامل از این مشکل می توان به جای نورپردازی پس زمینه توسط یک صفحه نوری از منابع نور (Telecentric ( collimated illuminators به همراه لنزهای Telecentric استفاده نمود. با استفاده از این گزینه، از آنجایی که تنها شعاع های نوری موازی تولید شده است تنها شعاع های نوری مورد نیاز به سمت لنز و سنسور تصویربرداری گسیل می شود دیگر هیچ مشکلی در لبه ها و کناره ها پیش نمی آید.

شکل ۱۱ – شعاع های نوری در هنگام استفاده همزمان از سیستم نورپردازی و لنز Telecentric
نتیجه گیری:
همان گونه که گفته شد دقت اندازه گیری این سیستم ها بستگی به لنز و رزولوشن دوربین استفاده شده دارد. به عنوان مثال رسیدن به دقت اندازه گیری ۵ میکرون، برای قطعه ای با قطر یک میلیمتر و با استفاده از دوربین ۵ مگاپیکسل و لنز متناسب با این میدان دید، دقتیدور از دسترس نیست.
مراجع
۱- خدادادی ، ؛ بهبهانی، س ؛ رستگارپناه ،ف ؛ نصیری ، ”
استفاده از تک نیک های پردازش تصویر به منظور تشخیص عیوب رایج
ورق های فو دی به صورت on- line “، نهمین کنفرانس مهندسی
ساخت و تولید ایران ، اسفند ۱۳۸۷ ، بیرجند
[۲] Telecentric Lenses Tutarial , www.opto-engineering.com
[۳] J. Weng, P. Cohen, M. Herniou, Camera calibration with distortion models and accuracy evaluation, IEEE Trans. Pattern Anal. Mach. Intell. 14 (1992) 965–۹۹۸٫
۴[سجادی، ا ؛ فدایی، ر : “پردازش تصویر عملی تصویر با [ MATLAB
” ، انتشارات نازوس، ص: ۱۱۹
[۵] http://en.wikipedia.org/wiki/Sub-pixel_resolution ,2011
[۶] Haralick, R.M. and L.G Shapiro. 1992. Computer and Robot Vision.Vol 2. Chapter 20 – Accuracy. AW.
[۷] K. Jensen, D. Anastassiou, Subpixel edge localization and the interpolation of still images, IEEE Transactions on Image Processing 4 (1995) 285–۲۹۵٫
[۸] http://www.ccs-grp.com ,2011
تهیه و تنظیم: شرکت دیده بنیان پارس